
 产品:351
产品:351
 联系我们
联系我们

当机械臂夹住一个对象并在某固定工具上工作时,用固定工具中心接触点。若该工具已启用,则编程路径和速度与机械臂夹住这一对象有关。也就是说,坐标系将倒过来,如图一所示。

图一:若用的是固定工具中心接触点,则对象坐标系通常是以腕坐标系为依据。
在图一所示示例中,既没用用户坐标系,也没用程序位移。但实际上可以用它们。在用了这两者的情况下,这两者将互相关联,如图二所示。
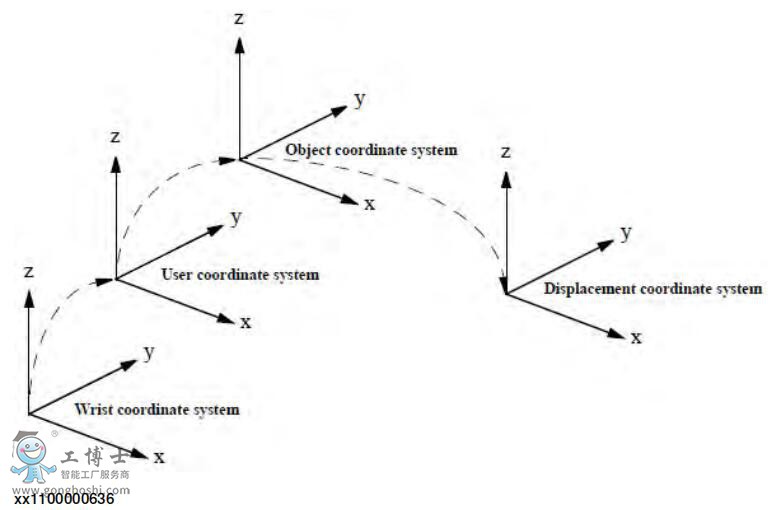
图21:程序位移可与固定工具中心接触点结合使用。
了解更多机器人资讯,点击:http://peijian.gongboshi.com/
- 下一篇:如何定义I/O装置——ABB机器人
- 上一篇:示教器的保养四要素——KUKA机器人