
 产品:351
产品:351
 联系我们
联系我们

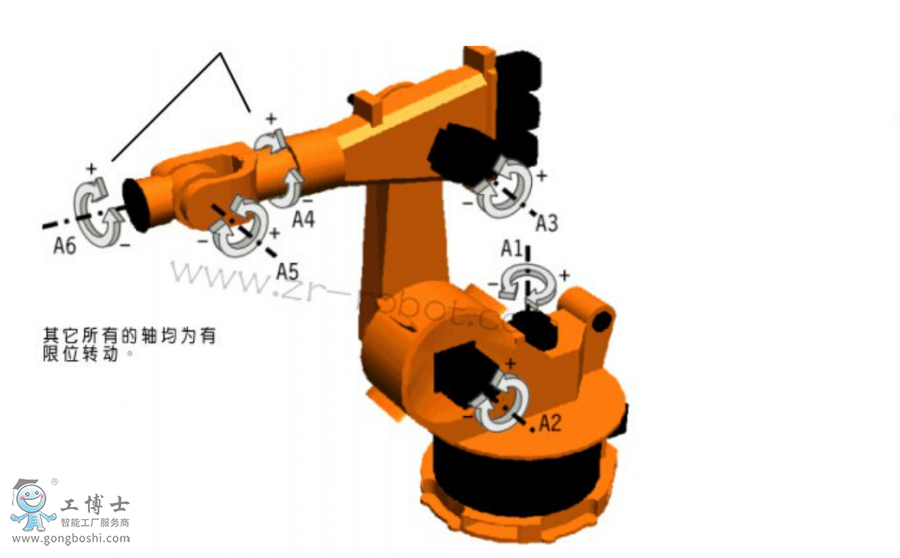
首先,机器人中什么是无限位转动的轴呢?
所有的KUKA机器人转轴(A1..A6) 在出厂时都定义为有限位转动(即通过软件限位开关)。但在
所有的KUKA机器人转轴(A1..A6) 在出厂时都定义为有限位转动(即通过软件限位开关)。但在
特定的应用情況下,轴A4和A6也可以被设置成无限位转动的轴。可在文件"$MACHINE.DAT〞 中实现相应的设置 。
相对于ABB机器人更改6轴为独立模式而言,KUAK机器人A6轴无限制转动将怎么实现呢?KUKA机器人本身就具备该功能,不需要额外的附加软件选项,通过修改变量即可。
KUKA变量:$Axis_Type相对于ABB机器人更改6轴为独立模式而言,KUAK机器人A6轴无限制转动将怎么实现呢?KUKA机器人本身就具备该功能,不需要额外的附加软件选项,通过修改变量即可。
变量名: $AXIS_TYPE
数据类型:整数
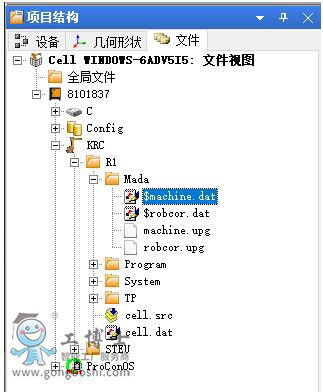
所在文件:R1Mada$machine.dat
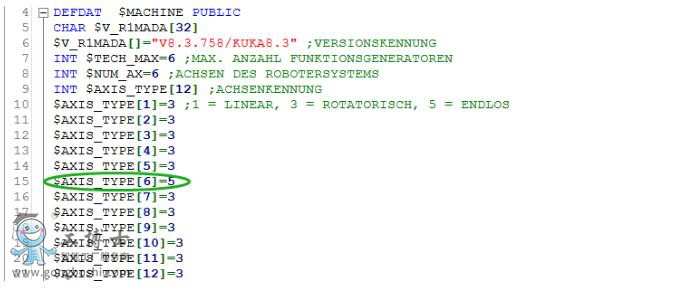
原始行:INT $AXIS_TYPE
注释: [1]-[6]分别指机器人A1-A6
[7]-[12]分别指外部轴E1-E6
说明: 1 线性轴
2 主轴
3 转动轴
4 受限制的转动
5 不受限制的转动
使用WorkVisual打开项目,在项目文件中找到$machine.dat文件,当然也可以直接使用示教器修改,本文以WorkVisual为例:
找到变量$Axis_Type将其值修改为“5”,“不受限制运动”后下载到控制器就可以完成修改,可以发现修改后示教器J6轴软限位设置隐藏了。
了解更多 KUKA机器人配件