
 产品:351
产品:351
 联系我们
联系我们

公司供应机器人配件及周边配套设备,包括本体配件、控制柜配件、示教器及线缆等,提供机器人维保和工业机器人的安装调试,软硬件设备的升级改造,7*24h全天售后服务为工厂企业的生产保驾护航,并且能够提供二手机器人购买和回收服务。目前我们服务机器人有ABB、库卡、安川、发那科等。
库卡机器人修正指令
操作步骤: 1选择菜单序列指令 > TouchSense > 修正。
在联机表单中选择 1D、 2D、 3D。
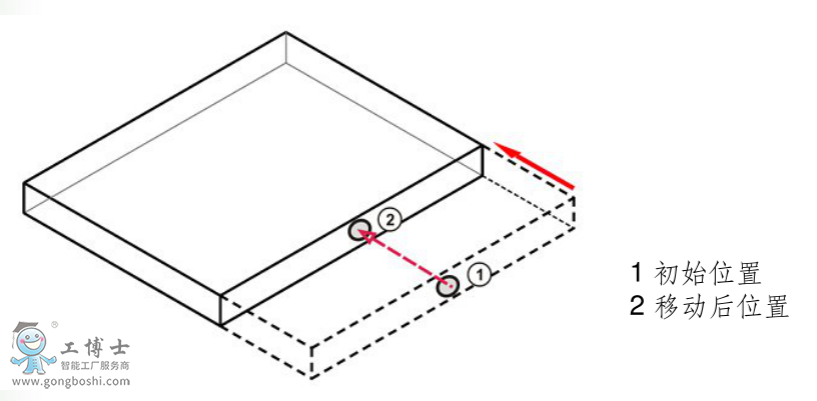
一维修正:
如果工件沿以下一个方向发生线性位移, 则使用该修正指令:
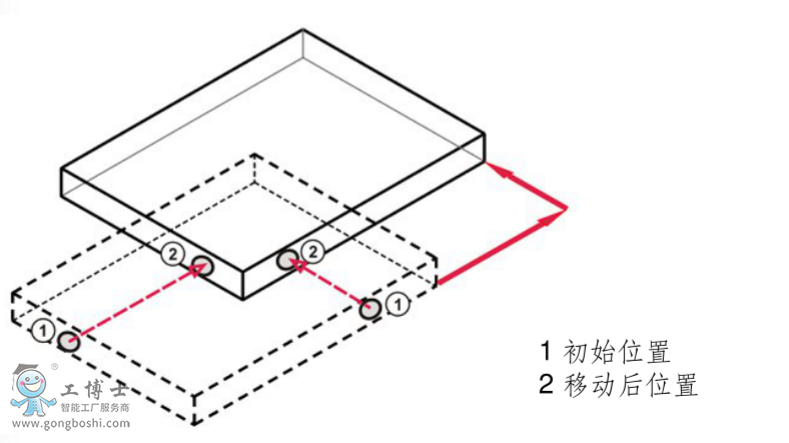
二维修正:
如果工件沿以下两个方向发生线性位移, 则使用该修正指令:
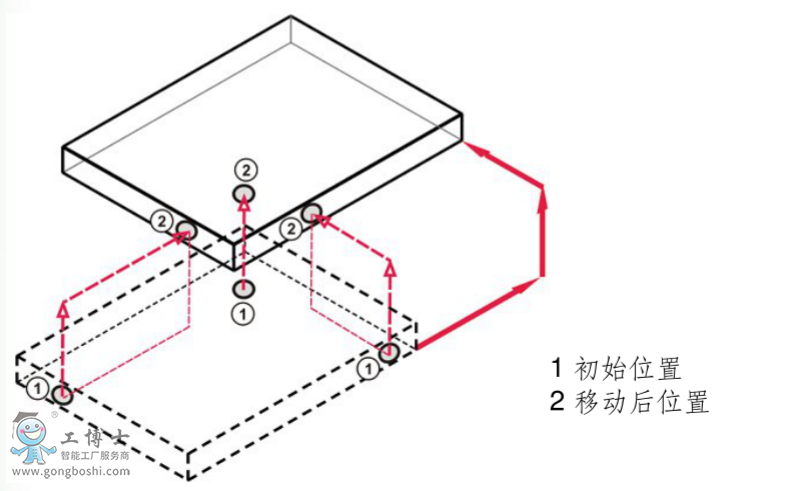
三维修正:
如果工件沿以下所有方向发生线性位移, 则使用该修正指令:
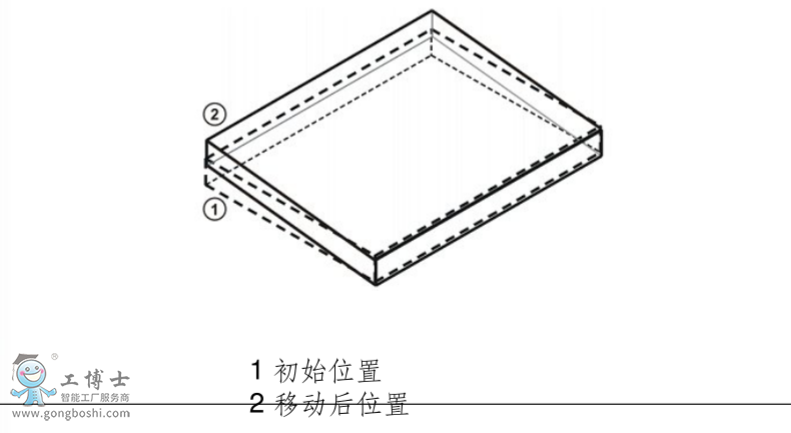
多方向修正:
如果工件沿以下一个或多个方向扭转, 则使用该修正指令:
1 、 联机表单中的第 1 、 2 和 3 栏用于定义维数 CD1 、 CD2 和 CD3 之间的一个平面。 维数可自 由分配给各栏。 (维数 CD1 无需在第 1 栏中给出。 在第 2或 3 栏也可以给出。 )
2、 联机表单中的第 4 和 5 栏用于定义维数 CD4 和 CD5 之间的一条线。 维数可自 由分配给各栏。
3、 联机表单中的第 6 栏用于定义维数CD6。

关闭修正
操作步骤: 选择菜单序列 指令 > TouchSense > 关闭修正。
说明: 每个修正指令都将启 动修正模式。 而该指令关闭修正模式。这意味着以下运动指令将不带修正执行。
了解更多 库卡机器人
分享到:
下一篇:库卡机器人系统日常维护保养
上一篇:库卡机器人接触寻位
更多资讯 库卡机器人

