
 产品:351
产品:351
 联系我们
联系我们

注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
模板文件位于RobotWare的以下安装目录中:
• ...\RobotPackages\RobotWare_RPK_
• ...\RobotPackages\RobotWare_RPK_

限制:模板文件中使用的加速值和减速值可能需要进行验证。 对于MID齿轮装置,必须仔细测试并重新定义(如果需要)工作范围。如果定义的值错误,则会有MID撞到终点止动装置的风险。
电机装置的加速转矩限制
在默认情况下会降低电机装置的加速转矩限制以保护连接的设备。电机装置的加速转 矩限制也可提升,请参阅产品规格-电机装置和齿轮装置。重新定义StressDutyCycle类型中的TorqueAbsoluteMax(主题Motion),可提 升电机装置的加速转矩限制。
文件名称约定
配置文件使用的命名约定基于以下数据:
• 配置主题
• 装置类型
• 驱动装置和驱动模块(系统参数DriveUnit和DriveModule)
• 测量链接、电路板位置和测量模式(系统参数Measurement
例如,MOC_MU100_M7DM1_L1B1N7.cfg 定义了:
• 主题Motion
• 电机装置MU100
• 驱动装置7和驱动模块1
• 测量链接1、电路板位置1和测量模式7

确定齿轮装置的尺寸
加速值和减速值:要保护齿轮装置不会运转过猛以及损坏齿轮箱,必须计算臂侧轴的加速值和减速值。此计算会得出系统参数NominalAcceleration和NominalDeceleration的*大值。如果加速过快,可以降低该数值,请参阅应用手册-Additionalaxesandstandalone controller。使用的加速值不得超过推荐的*大。

*大化齿轮箱转矩

配置调整
可以调整模板配置文件,以优化性能。使用TuneMaster来调整配置数据,或者 按照附加轴的说明进行调整。
TuneMaster是一种便利的PC工具,用于优化运动性能。TuneMaster包含在文件夹 Tools的RobotWare分发中。安装的帮助文件描述了TuneMaster使用方法。
基本调整方法
如何调整取决于所用工具。不过,以下步骤均适用:
1 无载荷试运行,检验是否需要调整。
2 带载荷试运行。
3 如需要,调整配置数据并重复第1至2步。
校准
何时校准
如果更换了传输部件,或者分解器内存丢失,则必须在安装后对机械装置进行校准。可通过微校定义校准零位并可更新转数计数器。操作员手册-带FlexPendant的IRC5和机器人产品手册对机器人校准作了说明。
有关电机换向的说明和有关坐标定位器以及用户框架的说明,请参阅ABB应用手册。
校准位置
任何位置均可定义为校准零位,但是必须可以反复的将轴非常精准的移动到该位置。例如,校准零位既可以是机械止挡,也可以是可以清晰显示该位置的指示器

微校机械装置
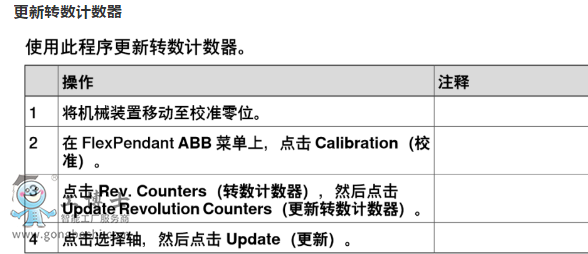
更新转数计数器
工博士可以提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人和常用机器人型号,工博士 现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解更多可点击查看:ABB机器人伺服电机,ABB机器人伺服电机维修,ABB机器人配件,机器人配件