
 产品:351
产品:351
 联系我们
联系我们

**步、把机器人3、4、5、6轴摇到零位,确认机器人周围没有干涉物品。
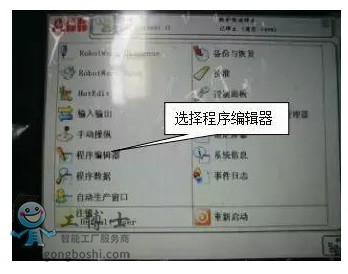
第二步、然后,点击程序编辑器,进入如下界面:
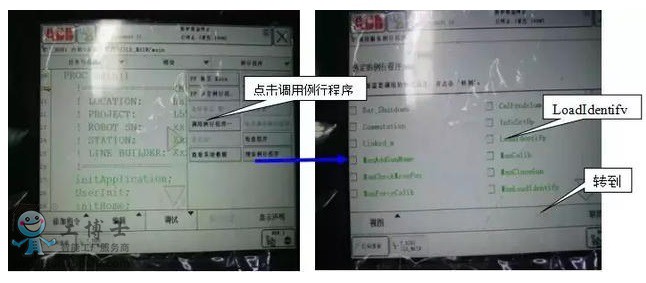
第三步、选择调用例行程序,选择LoadIdentify,点击转到,进入如下界面:
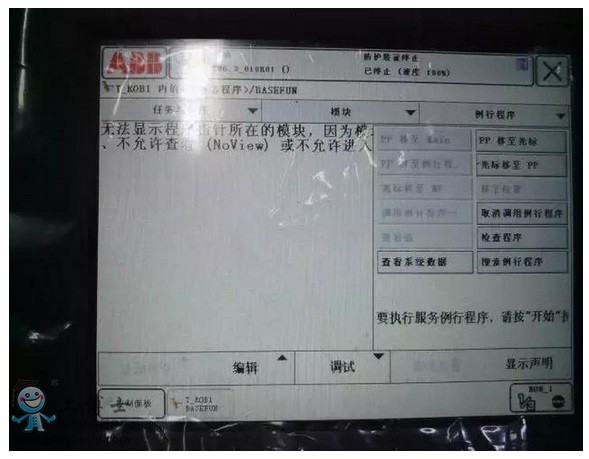
第四步、点击开始键,示教器会显示提示信息点击OK确认,选择工具TOOL,点击两次OK确认,显示界面如下:
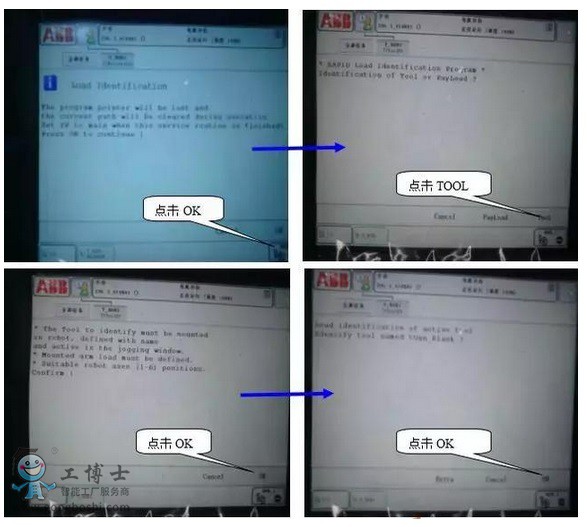
第五步、选择2号(未知工具负载)点击确定,接着选择+90或是-90,弹出提示窗口选择YES,点击MOVE,点击MOVE后机器人开始动作切记确认机器人旁没有干涉物以免发生碰撞,显示如下界面:
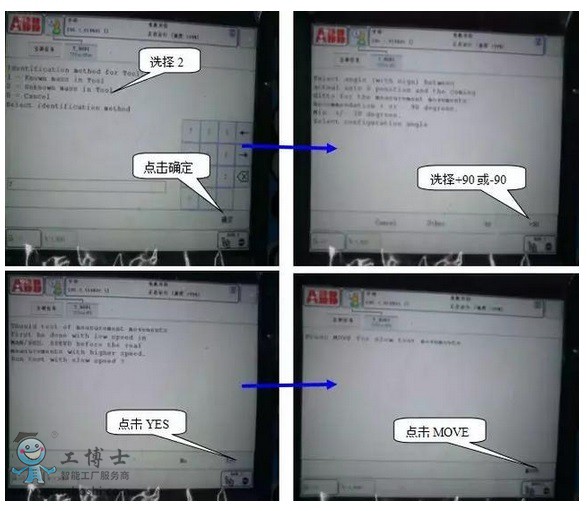
第六步、机器人动作过程中及结束后会弹出下面窗口:
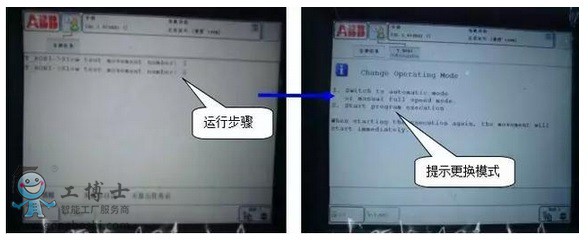
第七步、把机器人打到自动模式,按下启动按钮,点击开始,机器人将自动运行,切记在自动运行时注意机器人有无干涉现象,运行结束后会弹出下面窗口:
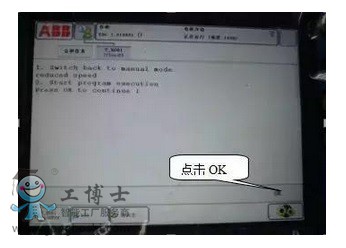
点击OK会弹出负载参数对照一下工具上标定的负载重量是否准确,若误差很小则保存参数,若相差很大则需重新标定负载参数。
*后,工具负载在机器人运作时,有很大的作用,所以我们需要正确设定工具负载。需要注意的是,在设定过程中,要明确工具的具体重量,注意机器人管线包是否干涉。而且自动模式下运行速度较快,要确认周边设备及自身的安全。如果做好了这些,那么就能够保证机器人加减速正常,延长机械寿命等
了解更多机器人资讯,点击:http://peijian.gongboshi.com/
- 下一篇:示教器的保养四要素——KUKA机器人
- 上一篇:ABB机器人开发未来医疗行业解决方案