更多详情:机器人配件
工业机器人配件资料中心
机器人配件后市场服务
 产品:351
产品:351
 联系我们
联系我们
经营范围:ABB、库卡等机器人示教器、线缆、本体、控制柜、软件等配件和周边设备一站式采购
 联系方式品牌配件
联系方式品牌配件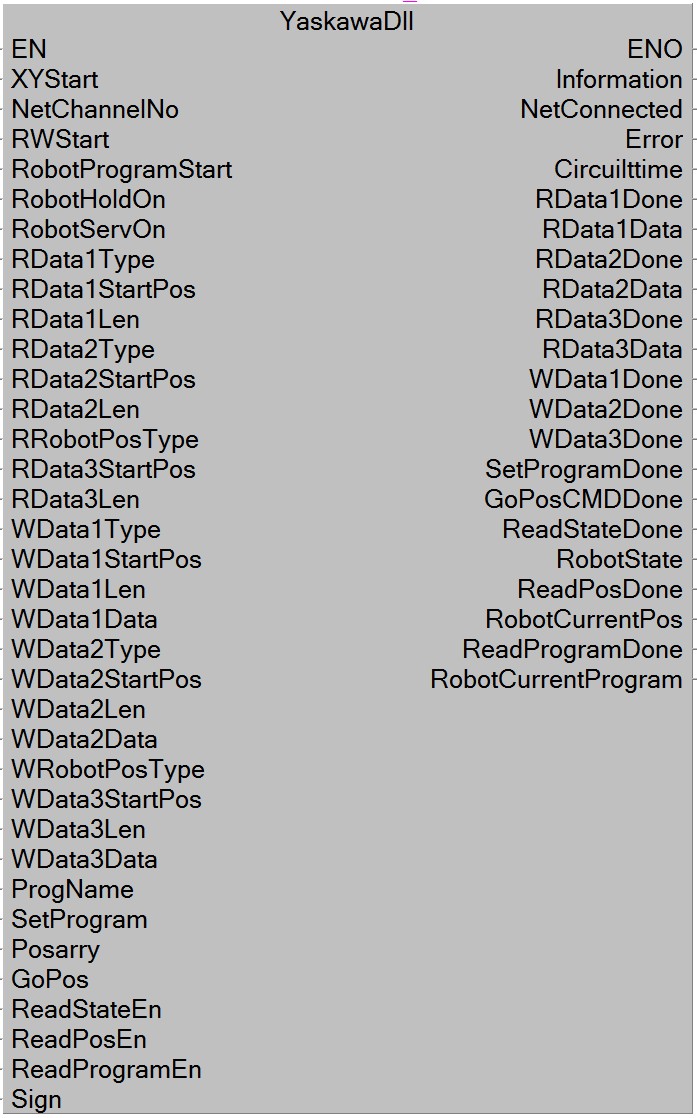
|
XYStart |
网络模块的起始XY地址 |
|
NetChannelNo |
通道号码,注意用1516两个通道,15为接收,16为发送,程序内定不可互换 |
|
RWStart |
通讯开始 |
|
RobotProgramStart |
机器人调用子程序开始执行 |
|
RobotHoldOn |
机器人暂停,1=暂停,0=取消 |
|
RobotServOn |
机器人伺服ON,1=ON,0=off |
|
RData1Type |
要读取的数据类型1 |
|
RData1StartPos |
要读取的数据起始地址1 |
|
RData1Len |
要读取的数据长度1 |
|
RData2Type |
要读取的数据类型2 |
|
RData2StartPos |
要读取的数据起始地址2 |
|
RData2Len |
要读取的数据长度2 |
|
RRobotPosType |
要读取的位置数据类型 |
|
RData3StartPos |
要读取的位置数据起始地址 |
|
RData3Len |
要读取的位置数据长度 |
|
WData1Type |
要写入的数据类型1 |
|
WData1StartPos |
要写入的数据起始地址1 |
|
WData1Len |
要写入的数据长度1 |
|
WData1Data |
要写入的数据1 |
|
WData2Type |
要写入的数据类型2 |
|
WData2StartPos |
要写入的数据起始地址2 |
|
WData2Len |
要写入的数据长度2 |
|
WData2Data |
要写入的数据2 |
|
WRobotPosType |
要写入的位置数据类型 |
|
WData3StartPos |
要写入的位置数据起始地址 |
|
WData3Len |
要写入的位置数据长度 |
|
WData3Data |
要写入的数据3 |
|
ProgName |
要设定的机器人子程序名称 |
|
SetProgram |
设定子程序命令 |
|
Posarry |
位置坐标 |
|
GoPos |
命令机器人去到上述位置点 |
|
ReadStateEn |
读取机器人状态使能 |
|
ReadPosEn |
读取机器人位置使能 |
|
ReadProgramEn |
读取机器人当前执行的程序名称及行数使能 |
|
Information |
错误等提示信息 |
|
NetConnected |
网络连接成功 |
|
Error |
错误状态 |
|
Circuilttime |
估算的以上选中读写刷新一次的时间ms |
|
RData1Done |
读数据1完成 |
|
RData1Data |
读数据1内容 |
|
RData2Done |
读数据2完成 |
|
RData2Data |
读数据2内容 |
|
RData3Done |
读位置数据完成 |
|
RData3Data |
读位置数据坐标 |
|
WData1Done |
写数据1完成 |
|
WData2Done |
写数据2完成 |
|
WData3Done |
写位置数据3完成 |
|
SetProgramDone |
设置子程序完成 |
|
GoPosCMDDone |
命令机器人去到位置点执行完成 |
|
ReadStateDone |
读机器人当前状态完成 |
|
RobotState |
机器人当前状态 |
|
ReadPosDone |
读机器人当前坐标完成 |
|
RobotCurrentPos |
机器人当前位置 |
|
ReadProgramDone |
读机器人当前程序完成 |
|
RobotCurrentProgram |
机器人当前程序名及行数 |
联系热线:15375311442 联系人:李经理 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 机器人配件后市场服务