
 产品:351
产品:351
 联系我们
联系我们


2、各按键介绍:
用于拔下 smartPAD 的按钮。
用于调出连接管理器的钥匙开关。只有当钥匙插入时,方可转动开关,可以通过连接管理器切换运行模式。
紧急停止键。用于在危险情况下关停机器人, 紧急停止键在被按下时将自行闭锁。
3D 鼠标。用于手动移动机器人。
移动键。用于手动移动机器人
用于设定程序倍率的按键。
用于设定手动倍率的按键。
主菜单按键。用来在 smartHMI 上将菜单项显示出来。
工艺键。工艺键主要用于设定工艺程序包中的参数, 其确切的功能取决于所安装的工艺程序包。
启动键。通过启动键可启动一个程序。
逆向启动键。用逆向启动键可逆向启动一个程序, 程序将逐步运行。
停止键。用停止键可暂停正运行中的程序。
键盘按键显示键盘。通常不必特地将键盘显示出来,smartHMI 可识别需要通过键盘输入的情况并自动显示键盘。

14. 示教触摸笔插孔。
15. USB插口。可以插入U盘进行系统备份,程序备份上传下载等。
16. 铭牌。

17. 启动按键,作用同面板10号键。
18. 确认开关(使能键),三个按键作用相同,有一个动作即可

3、示教器界面各图标介绍:

1. 时间显示 2. Workvisual项目
3. 信息提示计数器 4. 主菜单键(作用同面板8号按键)
5. 信息窗口 6. Submit解释器
7. 驱动装置 8. 程序状态
9. 运行模式 10. 程序运行倍率及手动倍率
11. 程序运行方式 12. 工具与基座标
13. 手动模式 14. 6D鼠标下的坐标系
15. 鼠标设置 16. 移动键下的坐标系
17. 移动方向(与按键对应) 18. 程序倍率
19. 手动倍率
4、提交解释器状态:

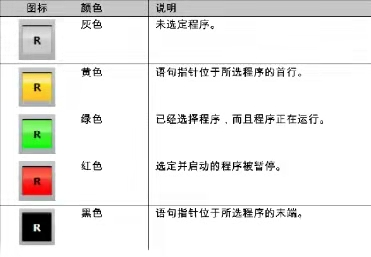
5、程序运行状态:
更多详情:机器人配件