
 产品:351
产品:351
 联系我们
联系我们

离线编程的程序通过支持软件的编译或者解释产生目标程序代码,然后生成机器人的路径规划数据。部分离线编程系统会带有仿真功能,可以在不接触机器人实际机器工作环境的情况下,在三维软件里为使用者提高一个和机器人进行交互作用的虚拟环境。
在对机器人的离线编程拥有了一定了解之后,下面让我们一起来阅读一下 百度经验 中,对于ABB机器人离线编程方法的分析。(来源于百度经验)
机器人编程新手建立***个离线程序并进行仿真操作的步骤如下:
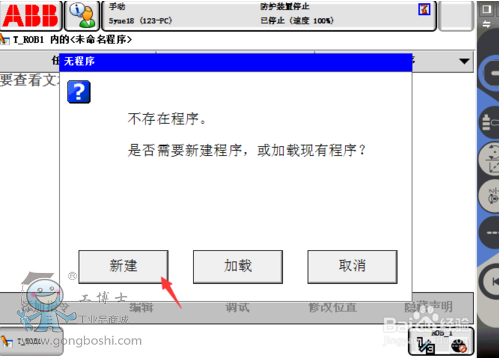
1.打开Robotstudio软件,运行虚拟示教器,打开示教器的虚拟程序编辑器建立***个程序。
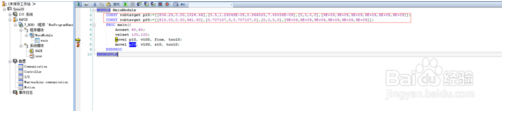
2.如下图操作,回到Robotstudio界面开始编辑离线程序
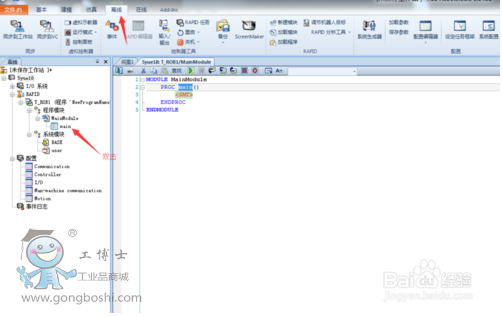
3.如下图所示编写***个程序

4.回到示教器再次打开程序编辑器我们会发现Robotstudio的程序同步到示教器上面了,双击p10和p20这里我们将新建p10 p20这两个机器人位置

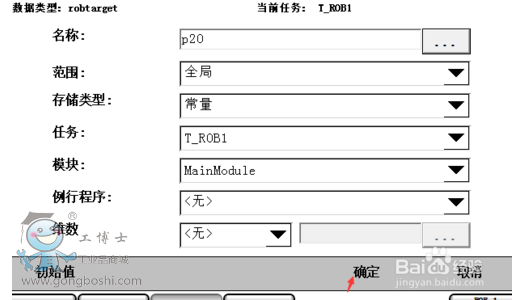
5.新建p20 p10 并确定
6.如下图可以拖动机器人的按钮并拖到想要去的位置,也就是p10的位置

7.回到示教器并点击修改位置,p20位置修改一样的道理
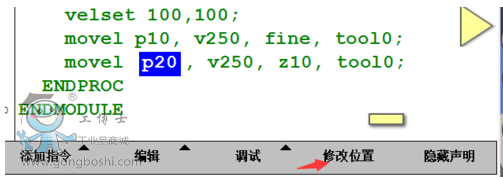
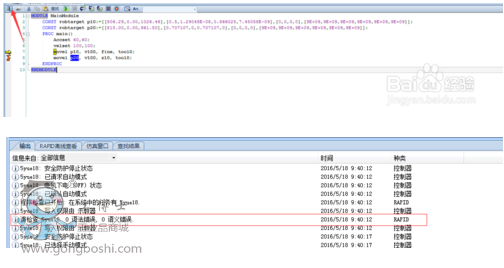
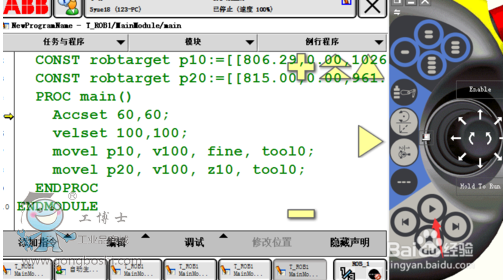
8.这时候Robotstudio编程界面就出现了开始的P10,p20位置数据
9.如下图所示,点击应用按钮就可以知道程序有没有出错,有错误找出并修改
10.确认无错误回到示教器并给电机上电

11.如下图所示点击对应按钮以进行调试
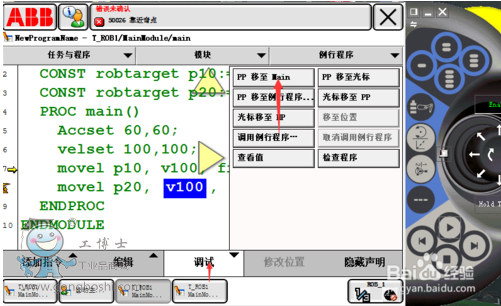
12.点击运行按钮就可以看到机器人仿真界面来回运动了
上述步骤文字及图片皆来源于百度经验,文字稍有修改。本图文教程从总体说来,在流程上较为完整,教学内容比较基础,适合编程新手参考学习。对于经验较少的编程人员,拥有一定的参考价值。
了解更多信息可点击咨询:ABB机器人配件、机器人配件、ABB机器人保养