
 产品:351
产品:351
 联系我们
联系我们

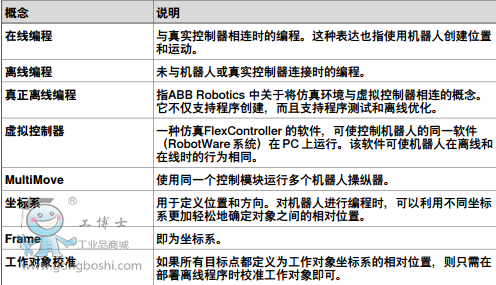
下表列出了使用 RobotStudio 时可能遇到的 RAPID 术语。概念按照大小进行排序,从***基本的概念开始。

二、编程概念
下表列出了机器人编程中所用的术语和概念。
三、目标点与路径
概述:在 RobotStudio 中对机器人动作进行编程时,需要使用目标点(位置)和路径(向目 标点移动的指令序列)。 将 RobotStudio 工作站同步到虚拟控制器时,路径将转换为相应的 RAPID 程序。
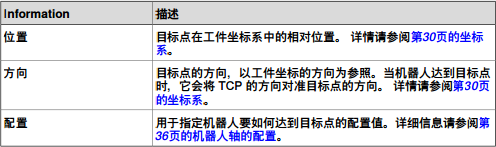
目标点:目标点是机器人要达到的坐标。它包含以下信息:
路径:路径指向目标点移动的指令顺序。 机器人将按路径中定义的目标点顺序移动。 路径信息同步到与虚拟控制器后将转换为例行程序。
移动指令:移动指令包括: • 参考目标点 • 动作数据,例如动作类型、速度和区域 • 参考工具数据 • 参考工作对象。
动作指令:动作指令是用于设置和更改参数的 RAPID 字符串。动作指令可插入路径中的指令目 标之前、之后或之间。
四、坐标系
概述:本节介绍了离线编程***常用的坐标系。在 RobotStudio中,您可以使用坐标系(在下面说明)或用户定义的坐标系进行元素和对象的相互关联。
层次结构:各坐标系之间在层级上相互关联。每个坐标系的原点都被定义为其上层坐标系之一中的某个位置。以下内容介绍了常用的坐标系统。
工具中心点坐标系:工具中心点坐标系(也称为TCP)工具的中心点。您可以为一个机器人定义不同的 TCP。所有的机器人在机器人的工具安装点处都有一个被称为 tool0 的预定义TCP。 当程序运行时,机器人将该 TCP 移动至编程的位置。 RobotStudio 大地坐标系:RobotStudio 大地坐标系用于表示整个工作站或机器人单元。这是层级的顶部,所有其他坐标系均与其相关(当使用 RobotStudio 时)。
基座 (BF):基础坐标系被称为“基座 (BF)”。在 RobotStudio 和现实当中,工作站中的每个机器人都拥有一个始终位于其底部的基础坐标系。
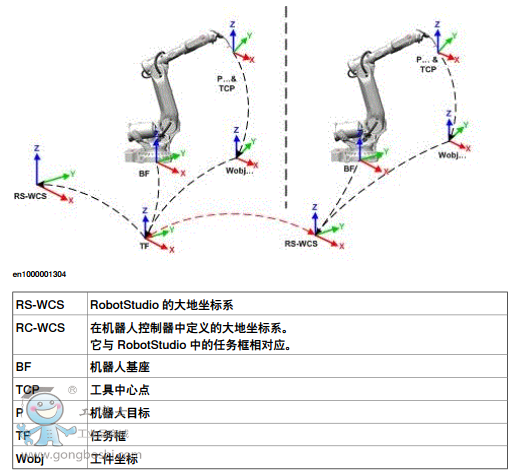
任务框 (TF) :在 RobotStudio 中,任务框表示机器人控制器大地坐标系的原点。 以下图片说明了基座与任务框之间的差异。 在图片的左侧,任务框与机器人基座位于同一位置。在图片的右侧,已将任务框移动至另一位置处。

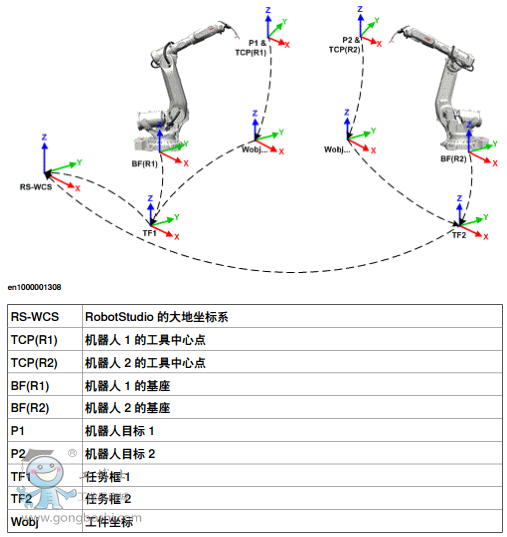
以下图片说明了如何将 RobotStudio 中的工作框映射到现实中的机器人控制器坐标系,例如,映射到车间中。
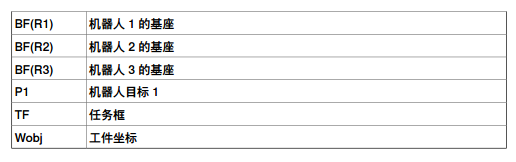
具有多个机器人系统的工作站:对于单机器人系统,RobotStudio 的工作框与机器人控制器大地坐标系相对应。如工作站中有多个控制器,则任务框允许所连接的机器人在不同的坐标系中工作。即可以 通过为每个机器人定义不同的工作框使这些机器人的位置彼此独立。

MultiMove Coordinated系统:MultiMove 功能可帮助您创建并优化 MultiMove 系统的程序,使一个机器人或定位器夹持住工件,由其他机器人对其进行操作。
当对机器人系统使用 RobotWare 选项 MultiMove Coordinated,时,这些机器人必须在同一坐标系中进行工作。同样地,RobotStudio 禁止隔离控制器的工作框。
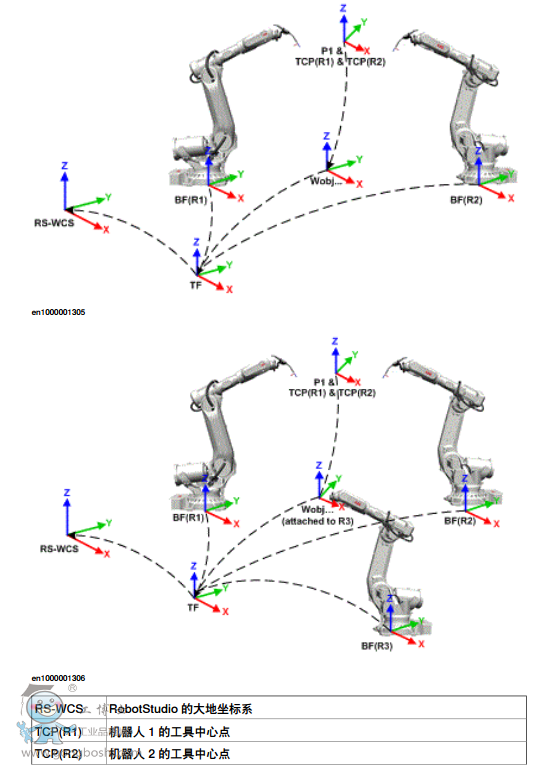
MultiMove Independent 系统:对机器人系统使用 RobotWare 选项 MultiMove Independent时,多个机器人可在一个控制器的控制下同时进行独立的操作。即使只有一个机器人控制器大地坐标系,机器人通常在单独的多个坐标系中工作。要在 RobotStudio 中实现此设置,必须将机器人的任务框隔离开来并彼此独立地定位。
工件坐标系:工件坐标系通常表示实际工件。它由两个坐标系组成:用户框架和对象框架,其中,后者是前者的子框架。对机器人进行编程时,所有目标点(位置)都与工作对象的对 象框架相关。如果未指定其它工作对象,目标点将与默认的 Wobj0 关联,wobj0始终与机器人的基座保持一致。 如果工件的位置已发生更改,可利用工件轻松地调整发生偏移的机器人程序。因此,工件可用于校准离线程序。如果固定装置或工件的位置相对于实际工作站中的机器人与离线工作站中的位置无法完全匹配,您只需调整工件的位置即可。工件还可用于调整动作。如果工件固定在某个机械单元上(同时系统使用了该选项调整动作),当该机械单元移动该工件时,机器人将在工件上找到目标。在下图中,灰色的坐标系为大地坐标系,黑色部分为工件框和工件的用户框。这里的 用户框定位在工作台或固定装置上,工件框定位在工件上。

用户坐标系:用户坐标系用于根据您的选择创建参照点。例如,您可以在工件上的策略点处创建用户坐标系以简化编程。
欲下载完全版使用手册请前往:ABB RobotStudio使用手册|说明书
工博士可以提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人和常用机器人型号,工博士 现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解更多可点击查看:ABB机器人伺服电机,ABB机器人伺服电机维修,ABB机器人配件,机器人配件